MCU开发过程中采集各类数据,无论是简单的温度、电压、电流,甚至是摄像头传出来的图像数据,多少都会受到电路噪声、环境噪声的影响,导致被噪声影响的数据触发了功能操作。
所以工程师们对于采集到的数据要有一定的敏感度,不能拿来就用。这时常见的滤波器就能对收集到的数据进行处理,过滤平滑收集的数据,防止被噪声影响。
前三者滤波器主打大力出奇迹,在连续的多点数据中得到想要的数据,使用均值或中位值的方式,抑制数据的波动,以达到平滑的效果;缺点也很明显,使用连续多点处理得出数据,会导致数据滞后,窗口越大,滞后性越强。
后两者则是数据迭代的思想,每次结果的都是依靠上次滤波器的结果和本次输入值,经过权重分配输出结果。
本文提供代码仅供思路参考,实际使用请根据项目适配!具体效果差异请自己尝试方可知道对数据的影响,这里只讲思路。
一、滑动平均滤波器#
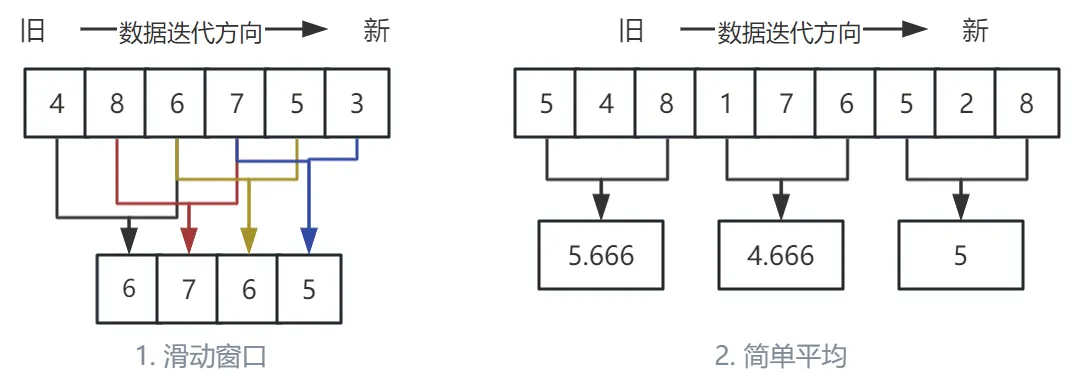
思路:取固定长度的窗口,对连续的数据相加,取均值。
缺点:不适合脉冲干扰比较严重的场合,灵敏度低,滞后性较强。
这是简单,计算速度最快的滤波器,在数据上下波动不是很大,并且不担心延迟的场景可使用。
滑动的过程可以是连续的,也可以是片段的,这里根据实际使用场景自己决定。
算法中不一定要使用滑动窗口,在函数内使用静态变量计数并累加输入值,到指定计数值后计算均值,清除计数和累计的数据值重新计数,这在实际应用中更为常见。
// 这里简单静态滑动窗口案例
#include <stdbool.h>
#define MOVING_AVG_BUF_SIZE (5) // 定义滑动窗口大小
typedef struct {
float buf[MOVING_AVG_BUF_SIZE]; // 环形缓冲区存储历史数据
float sum; // 缓冲区数据的总和
int index; // 当前缓冲区位置
bool buf_full; // 缓冲区满了
} moving_avg_st;
// 初始化滑动平均滤波器
void moving_avg_init(moving_avg_st *filter)
{
filter->index = 0;
filter->sum = 0.0f;
filter->buf_full = false;
for (int i = 0; i < MOVING_AVG_BUF_SIZE; i++)
{
filter->buf[i] = 0.0f;
}
}
// 更新滤波器并计算当前平均值
float moving_avg_updata(moving_avg_st *filter, float input)
{
int current_buf_size = MOVING_AVG_BUF_SIZE;
if (!filter->buf_full)
{
current_buf_size = filter->index + 1;
}
// 减去即将被替换的旧数据(如果缓冲区已满)
if (filter->buf_full)
{
filter->sum -= filter->buffer[filter->index];
}
else if (current_buf_size >= MOVING_AVG_BUF_SIZE)
{
filter->buf_full = true;
}
// 添加新数据到缓冲区
filter->buf[index] = input;
filter->sum += input;
filter->index = (filter->index + 1) % MOVING_AVG_BUF_SIZE;
return filter->sum / current_buf_size ;
}二、中位值滤波器#
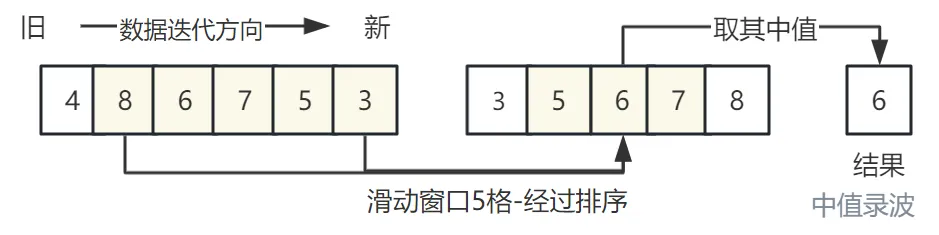
思路:取固定长度的窗口,对窗口内数据进行排序,取中位数。
缺点:每次都需要计算排序,影响性能;对快速的信号变化反应比较慢。
中位值滤波器去噪效果好,每次都是取连续数据的中值,这能有效的过滤异常数据,并保持信号的原始特征;在只需要过滤数据异常值的场景上很适用,比如偶尔出现的一两个最大或最小的极值,这里能有效滤除。
中值滤波不一定要使用滑动窗口,缓冲区累计数据到指定大小取中值,然后在清空缓冲区重新累计也是常见做法。
// 这里简单静态滑动窗口案例
// 中位值滤波窗口至少要大于 3, 并且为奇数最佳
#include <stdbool.h>
#define MOVING_MEDIAN_BUF_SIZE (5) // 定义滑动窗口大小
typedef struct {
int buf[MOVING_MEDIAN_BUF_SIZE]; // 环形缓冲区存储历史数据
int index; // 当前缓冲区位置
bool buf_full; // 缓冲区满了
} moving_median_st;
// 初始化滑动平均滤波器
void moving_median_init(moving_median_st *filter)
{
filter->index = 0;
filter->buf_full = false;
memset(filter->buf, 0, sizeof(filter->buf));
}
// 更新滤波器并计算当前平均值
int moving_median_updata(moving_median_st *filter, int input)
{
int result = 0;
// 添加新数据到缓冲区
filter->index = filter->index % MOVING_MEDIAN_BUF_SIZE;
filter->buf[filter->index] = input;
filter->index++;
if (!filter->buf_full && filter->index >= MOVING_MEDIAN_BUF_SIZE)
{
filter->buf_full = true;
}
if (filter->buf_full)
{
int arr[MOVING_MEDIAN_BUF_SIZE];
memcpy(arr, filter->buf, sizeof(filter->buf));
// 排序
bubble_sort(arr, MOVING_MEDIAN_BUF_SIZE);
// 取中间值
result = arr[ MOVING_MEDIAN_BUF_SIZE/2];
}
else
{
result = input;
}
return result;
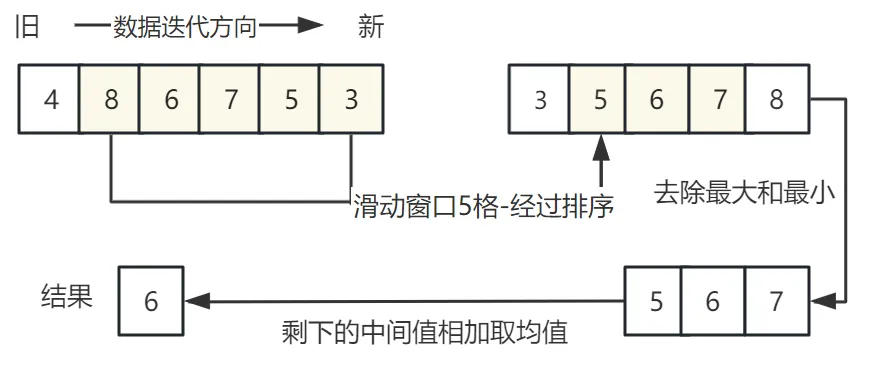
}三、中位值平均滤波#
思路:固定窗口取连续的几点,去掉最高的几个数据,去掉最低的几个数据,剩余数据取均值。
缺点:每次都需要计算排序比较消耗性能,在快速变化大的情况下会产生“阶梯效应”,因为均值时数据会受到旧小数据的影响,就出现阶梯的形状。
中位值平均滤波结合了中值滤波的过滤异常值,并且也结合了均值滤波的稳定数据,小窗口下还能多保留些细节,但数据变化较大时,变化曲线容易呈现阶梯状;数据带有个别噪点,同时又在小幅度抖动,可使用本滤波器,
代码上就是在中值滤波上增加了去除最大值和最小值,均值中间几点数据出结果;但如果小一维窗口可以更简单些,不用排序。
// 这里简单静态滑动窗口案例
// 中位值平均滤波,这里案例是常用窗口5点,去除最大最小点,无需排序。
#include <stdbool.h>
#define MOVING_MEDIAN_AVG_BUF_SIZE (5) // 定义滑动窗口大小
typedef struct {
int buf[MOVING_MEDIAN_AVG_BUF_SIZE]; // 环形缓冲区存储历史数据
int index; // 当前缓冲区位置
bool buf_full; // 缓冲区满了
} moving_median_avg_st;
// 初始化滑动平均滤波器
void moving_median_init(moving_median_avg_st *filter)
{
filter->index = 0;
filter->buf_full = false;
memset(filter->buf, 0, sizeof(filter->buf));
}
// 更新滤波器并计算当前平均值
int moving_median_updata(moving_median_avg_st *filter, int input)
{
int result = 0;
// 添加新数据到缓冲区
filter->index = filter->index % MOVING_MEDIAN_AVG_BUF_SIZE;
filter->buf[filter->index] = input;
filter->index++;
if (!filter->buf_full && filter->index >= MOVING_MEDIAN_AVG_BUF_SIZE)
{
filter->buf_full = true;
}
if (filter->buf_full)
{
int max_vlue = filter->buf[0];
int min_value = max_vlue;
int sun = 0;
for (int i = 1; i < MOVING_MEDIAN_AVG_BUF_SIZE; i++)
{
int vlue = filter->buf[i];
if (vlue > max_vlue)
{
max_vlue = vlue;
}
if (vlue < min_value)
{
min_value = vlue;
}
sun += vlue;
}
result = sun / (MOVING_MEDIAN_AVG_BUF_SIZE - 2);
}
else
{
result = input;
}
return result;
}四、指数加权移动平均滤波#
指数加权移动平均滤波(EWMA),这一串名词蹦出来挺高大上的,其实没啥,先看其公式:
![]()
t表示当前时间;v为经过滤波器的数据;θ为当前输入值;β为权重系数,是两个数据在结果中所占的百分比。
这里定上一时间的结果权重40%,所以根据公式为:
- 滤波结果 t= 滤波结果t-1 * 0.3 + (1 - 0.3)* 输入数据t。
当然每次的滤波结果都需要记录下来不断更新,并应用到下次计算当中。
滤波后的数据会受到历史数据的影响不会跳动太大,能够反映出接下来数据变化的趋势,但由于受到旧数据的影响,整体趋势会有一定的滞后。(嚼碎了啊喂,请动动小脑袋好好理解一下)
思路:对历史结果乘固定百分比β,最新数据乘(1-β)的百分比,两者相加后得到输出值,并且输出值更新值历史结果用于下次计算;历史结果和最新数据所占的权重相加等于1。
它对数据平滑的效果无敌,但是过度平滑会导致数据失真,所以需要调整参数 β 来达到想要的效果。
 图片来源:https://blog.csdn.net/qq_42363032 ↗
图片来源:https://blog.csdn.net/qq_42363032 ↗
留下作业:下方代码这样就够了嘛,如果使用在温度检测上,真实数据突然变得很大会有什么问题?有什么办法可以缓解因为温度骤升或骤降而失真延迟太大的问题。。。
// 指数加权移动平均
#define EWMA_SMOOTH_ALPHA_EDGE 1.0f // 边缘当前质心权重占比
#define EWMA_SMOOTH_ALPHA_SMOOTH 0.3f //平滑后参数
#define EWMA_TRANSITION_STEPS_COUNT 3 //收敛速度
// 指数均值移动滤波对象
typedef struct{
float prev_smoothed_value; // 存储上个值
float alpha; // 权重
}ewma_smoother_st;
// 指数加权移动平均-------------------------------------------------------------
void ema_smoother_init(ewma_smoother_st *ewma)
{
ewma->prev_smoothed_value = 0.0f;
ewma->alpha = EWMA_SMOOTH_ALPHA_SMOOTH;
}
/**
* 指数加权移动更新
*/
float ema_smoother_update(ewma_smoother_st *ewma, float current_value)
{
// 动态调整平滑系数
if (ewma->alpha > EWMA_SMOOTH_ALPHA_SMOOTH)
{
ewma->alpha -= ((EWMA_SMOOTH_ALPHA_EDGE - EWMA_SMOOTH_ALPHA_SMOOTH)
* (1.0f / EWMA_TRANSITION_STEPS_COUNT));
}
else
{
ewma->alpha = EWMA_SMOOTH_ALPHA_SMOOTH;
}
ewma->prev_smoothed_value = ewma->alpha * current_value + (1.0f - ewma->alpha ) * ewma->prev_smoothed_value;
return ewma->prev_smoothed_value;
}五、一维卡尔曼滤波器#
经典卡尔曼滤波,这里先简单解释一下一维卡尔曼,后续在做专题仔细介绍。
思路:它是通过之前数据的测量误差预测下一数据的值,然后用这个值去修正测量出的下一数据,得出结果,并记更新测量误差用于下次计算,本质是指数加权移动滤波(EWMA)加上更复杂的动态系统模型,进行更为系统化的动态权重计算。
一维卡尔曼指定了固定的Q(过程噪声)和R(测量噪声),Q反应了模型预测的误差,越高则表示模型越不可靠,预测值权重占比越低,反之亦然;R表示传感器测量的误差,越高表示测量噪声越大,测量值权重占比越低,反正亦然。
卡曼计算滤波计算流程如下图:
 图片来源:https://zhuanlan.zhihu.com/p/492776982 ↗
图片来源:https://zhuanlan.zhihu.com/p/492776982 ↗
由于一维卡尔曼的F(状态转移矩阵)和H(观测矩阵)退化为标量1,因此只能滤波静态噪声,无法用于动态跟踪。
//一维简单静态卡尔曼
typedef struct
{
float x; // 状态估计——滤波结果
float p; // 估计协方差
float q; // 过程噪声——模型不确定性
float r; // 测量噪声——传感器噪声
}kalman_1d_st;
// 卡尔曼滤波器
void kalman1d_init(kalman_1d_st * kf, float init_x, float init_p, float init_q, float init_r)
{
kf->x = init_x;
kf->p = init_p;
kf->q = init_q;
kf->r = init_r;
}
/**
* 卡尔曼滤波器更新
*/
float kalman1d_update(kalman_1d_st * kf, float x)
{
// 预测
kf->p = kf->p + kf->q;
// 更新
float K = kf->p / (kf->p + kf->r); // 增益
kf->x = kf->x + K * (x - kf->x); // 状态更新
kf->p = (1.0f - K) * kf->p; // 协方差更新
return kf->x;
}结语#
以上是一些基础的平滑滤波算法,掌握其思想,在程序上才能保证采集数据的稳定。
本文非AI创作,如转载请注明出处。